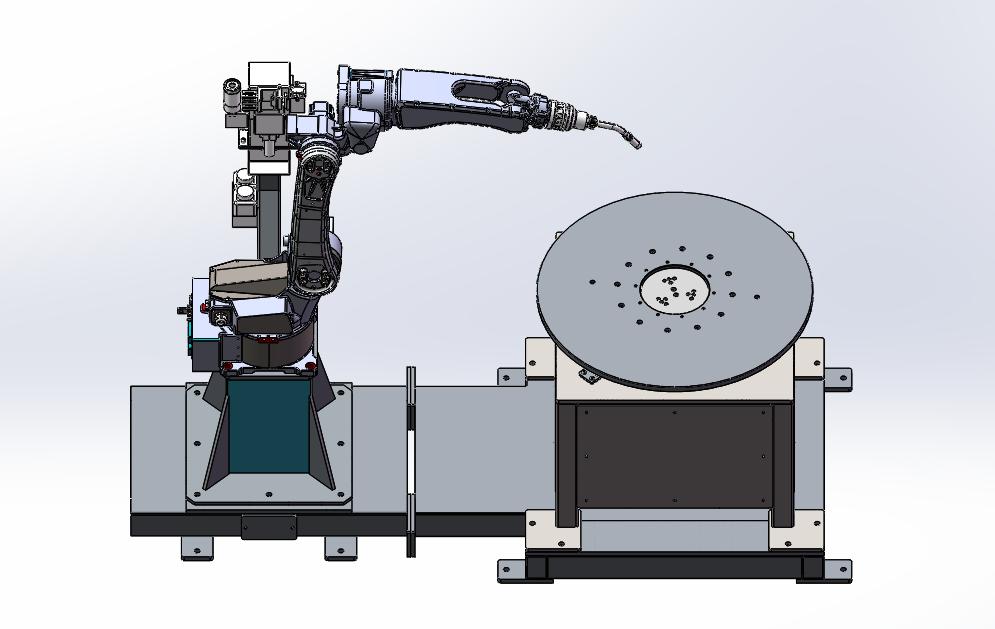
6-aksa robota laborstacio por veldado de neoksidebla ŝtalo kaj aluminio






Trajto
1. La enkonstruita kablodezajno de la roboto permesas al la roboto moviĝi sen ĝeno kaj la aranĝo de la laborejo estas orda kaj pura.
2. La robota stirkabineto povas regi ĝis 11 aksojn, evitante kompleksan PLC-sencimigadon kaj spacokupadon
3. La JHY-roboto kaj la poziciigilo povas esti sinkronigitaj, kaj la roboto povas veldi samtempe kiam la poziciigilo rotacias, igante ĉi tiun laborstacion aparte taŭga por cirkla veldado.
4. Vasta gamo de helpaj ekipaĵoj estas havebla, kiel ekzemple laseraj sensiloj, sekurecaj lumkurtenoj kaj sekurecaj bariloj.
5. La stirsistemo enhavas plurajn pakaĵojn de veldaj procezoj, kiuj permesas uzi malsamajn veldajn reĝimojn por malsamaj laborpecoj.
Teknika parametro de poziciigilo
| Modelo | JHY4030D-080 |
| Taksita Enira Tensio | Unufaza 220V, 50/60HZ |
| Motora Izolado Kalsoj | F |
| Labortablo | Diametro 800mm (povas esti personigita) |
| Pezo | Ĉirkaŭ 400 kg |
| Maks. Utila Ŝarĝo | Aksa Utila Ŝarĝo ≤300kg / ≤500kg / ≤1000kg (>1000kg povas esti adaptita) |
| Ripeteblo | ±0.1mm |
| Haltiga Pozicio | Ajna Pozicio |
Komponantoj de robotaj laborstacioj
1. Velda roboto:
Tipo: MIG-velda roboto-BR-1510A, BR-1810A, BR-2010A
TIG-velda roboto: BR-1510B, BR-1920B
Lasera velda roboto: BR-1410G, BR-1610G
2. Poziciigilo
Modelo: JHY4030D-080
Tipo: 1-aksa horizontala rotacianta poziciigilo
3. Fonto de veldado
Tipo: 350A/500A velda energifonto
4. Veldpafilo
Tipo: aermalvarmigita pafilo, akvomalvarmigita pafilo, puŝtira pafilo
5. Torĉa purigstacio:
Modelo: SC220A
Tipo: Aŭtomata pneŭmatika veldtorĉa purigilo
Alia robota laborstacio flankaparato
1. Roboto movanta relon
Modelo: JHY6050A-030
2. Lasera sensilo (laŭvola)
Funkcio: veldspurado, poziciigado.
3. Sekureca lumkurteno (laŭvola)
Protekta distanco: 0,1-2m, 0,1-5m; protekta alto: 140-3180mm
4. Sekureca barilo (nedeviga)
5.PLC-ŝranko (laŭvola)





