Ĉina Altkvalita Mig-Veldada Roboto Por Veldado De Neoksidebla Ŝtalo







Robota Korpo
La roboto JHY ĉefe ŝanĝiĝas en la premgisada procezo kaj detala dezajno de la korpo. Nia esplor- kaj disvolva teamo faris multajn novigojn en la dezajno de la robota korpo, posedante pli ol dek novajn inventopatentojn.
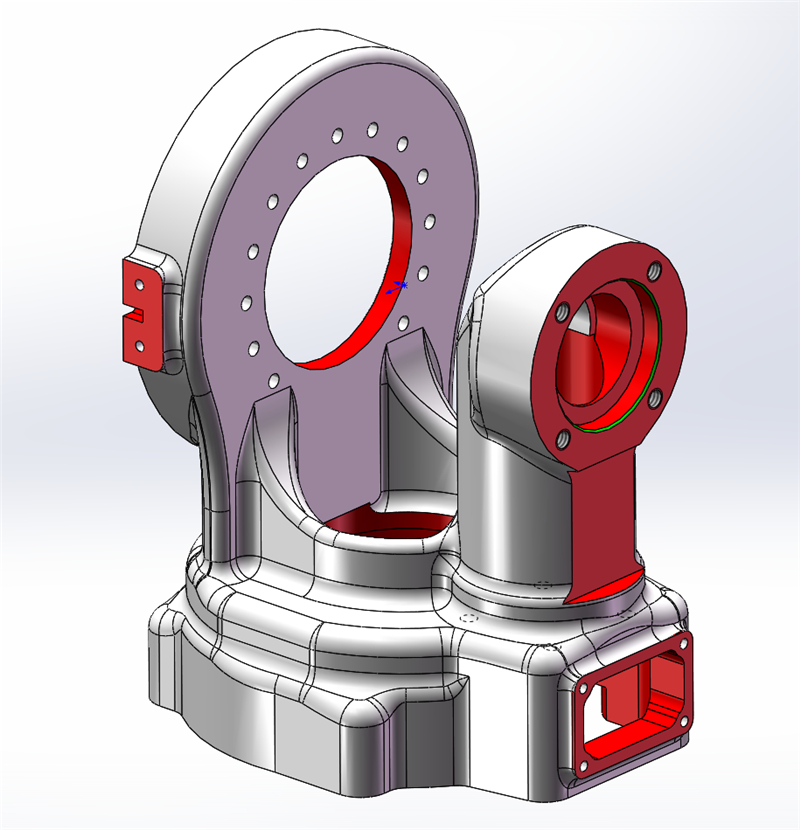
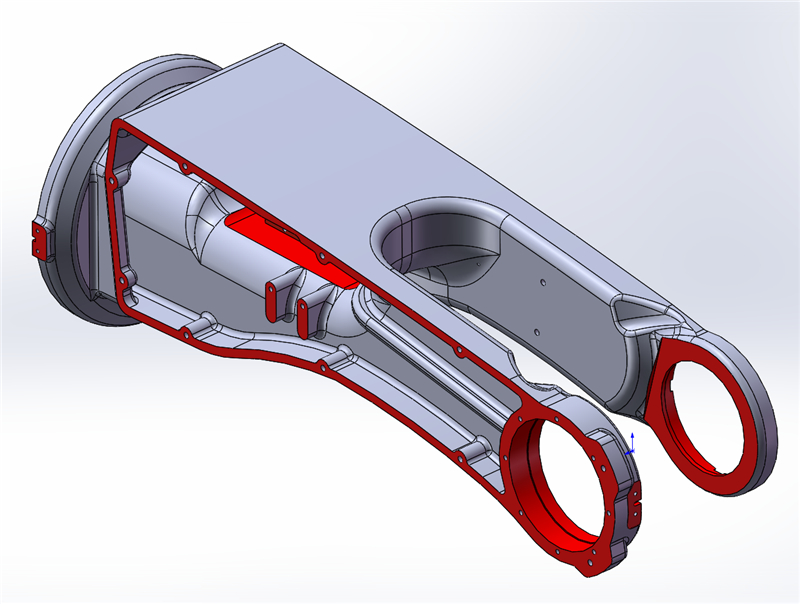
Ekzemple, la sesa akso evoluigis altprecizan transmisian mekanismon kaj desegnis plifortigajn stangojn, ankaŭ la sesa rada elira disko adoptas senrapiduman dezajnon, kiu multe plibonigis la precizecon kaj stabilecon de la roboto. Eĉ se la veldtorĉilo funkcias en malfacila pozicio, ĝi tamen povas certigi la stabilecon sen tremado. Ĉi tiun punkton konfirmis niaj hejmaj klientoj.
La robotkorpo estas produktita per premgisada teknologio, tio faras niajn robotojn kun alta denseco, pli malpezaj. La antaŭa brako povas esti pli mallarĝa kaj pli longa, la proporcio inter la supra brako kaj la antaŭa brako estas pli proksima al la ora proporcio, do moviĝas pli flekseble kaj pli rapide.
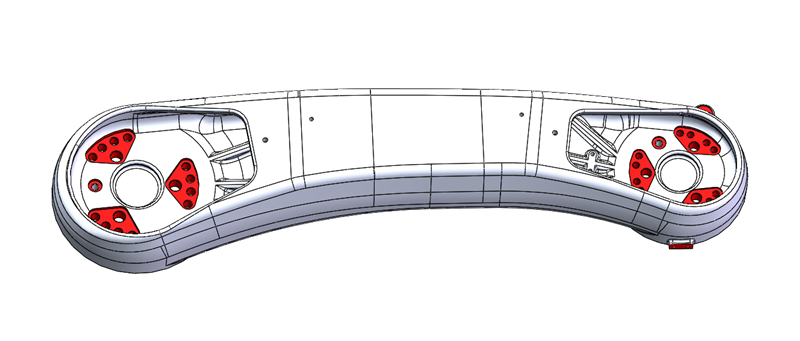
Skiza Dezajno
La dezajno de la rekta antaŭbrako de la roboto estas pli simpla kaj eleganta. Kun sento de dezajno, pli konforma al la estetiko de la eŭropa merkato. La dezajno de la robota korpo petis plurajn teknikajn patentojn, kaj la nova robota korpo estas pli perfekta.
Plej Bonaj Markoj de Dratoj
La internaj dratoj kaj terminaloj de la roboto estas fabrikitaj de la ĉefaj japanaj markoj: DYEDEN, TAIYO, same kiel ABB kaj Fanuc.
Terminalo: itala marko Yierma.
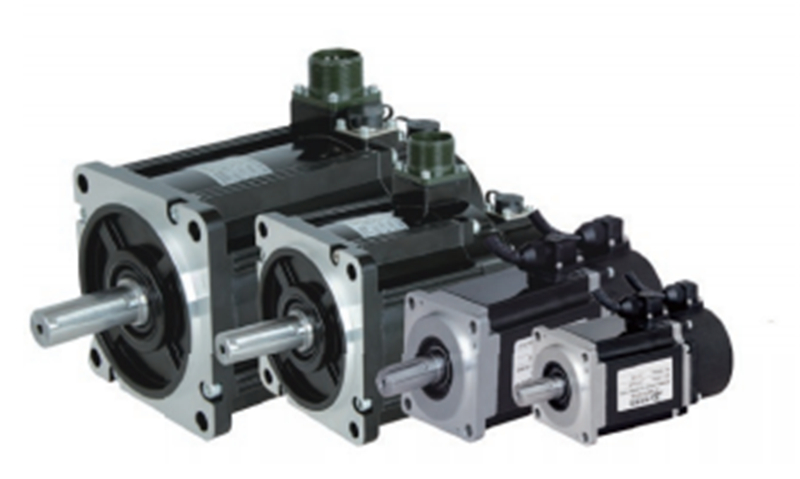
Ĉefaj Markoj De Servomotoro / Ŝoforo / Reduktilo
Ĉiuj el ili uzas la ĉefajn markojn en Ĉinio. Ĉiu marko estas longe testita kaj esplorita antaŭ ol la fina decido estas farita, por certigi, ke ĉi tiuj markoj taŭgas por la uzo de niaj robotoj kaj ke ilia kvalito kaj funkciado estas stabilaj kaj fidindaj.
La aksoj J1 kaj J2 adoptas la dezajnon de tri ekscentraj ŝaftoj kun tordmomanto ĝis 65 Nm, kio reduktas la eluziĝon de la dentrado kaj plilongigas la servodaŭron de la reduktilo. La reduktiloj de la robotaj aksoj J1 kaj J3 de JHY nuntempe estas la plej alta konfiguracio en Ĉinio.
Pri la servomotoro, nun ni uzas maksimume 3kw motoron por robotoj.
Por robotoj de 1,8 m kaj 2 m, la mova forto bezonata por la 1-a kaj 2-a aksoj estas pli granda, kaj la postuloj por la motora potenco ankaŭ estas pli altaj.
La altprecizaj kaj multspecifaj motoroj povas plene kontentigi la aplikajn postulojn por nia roboto.

3 jaroj/7500h Senprizorgada
La bontenado estas simpla, klientoj mem povas facile funkciigi ĝin.
Aliaj Patentoj kaj Dezajnoj
6-aksa sekundara transmisio Ŝanĝita al du rimenaj konektoj, pliigita la transmisia proporcio, kaj solvita la problemo de 6-aksa movado tro rapida kaj malpreciza. La sesa-aksa eliga disko estas desegnita sen dentradoj, kun alt-preciza transmisia mekanismo, kiu plibonigas la movadprecizecon de la sesa akso... Nuntempe ni havas pli ol 30 rilatajn patentojn por la velda roboto.
Video
Parametroj
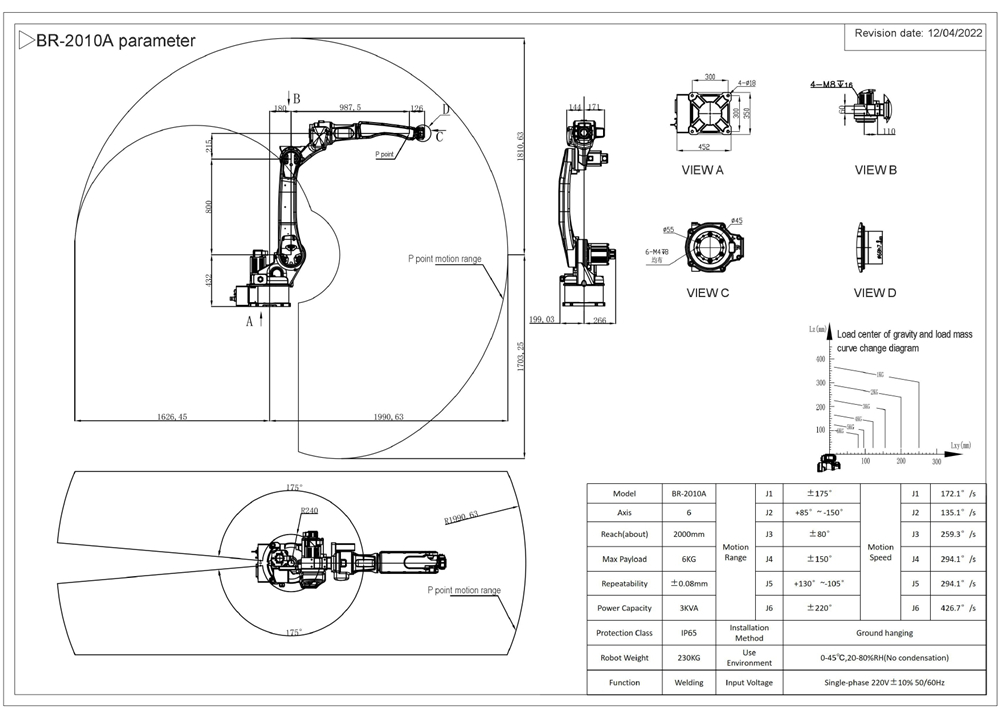
| Modelo | BR-2010A | Moviĝa Amplekso | J1 | ±175° | Moviĝa Rapido | J1 | 172.1°/s |
| Akso | 6 | J2 | +85°~ -150° | J2 | 135.1°/s | ||
| Atingo (ĉirkaŭ) | 2000mm | J3 | ±80° | J3 | 259.3°/s | ||
| Maksimuma Utila Ŝarĝo | 6KG | J4 | ±150° | J4 | 294.1°/s | ||
| Ripeteblo | ±0.08mm | J5 | +130°~-105° | J5 | 294.1°/s | ||
| Potenco-Kapacito | 3KVA | J6 | ±220° | J6 | 426.7°/s | ||
| Protekta Klaso | IP65 | Instala Metodo | Grunda pendanto | ||||
| Robota Pezo | 230 kg | Uzu Medion | 0-45℃, 20-80%RH (Sen kondensado) | ||||
| Funkcio | Veldado | Eniga tensio | Unufaza 220V±10% 50/60Hz | ||||
Produktaj kategorioj
-

6-aksa MIG-velda roboto kun malalta ŝprucado kaj atingo de 1800mm
-

6-aksa MIG MAG velda roboto gamo 1500mm kun ...
-

Altkvalita veldroboto uzata por veldi meblojn
-

JHY 6-aksa robota brako industria aŭtomata arka m ...
-

2000mm atingo veldroboto por veldado de karbona ŝtalo...
-

MIG-velda roboto kun 2000mm enverguro por ŝtala...